
Colibrí Archilodus colubris. Foto: Edwin Yoo

Un equipo internacional con participación del Consejo Superior de Investigaciones Científicas (CSIC) ha estudiado el comportamiento colectivo de los grandes grupos de langostas del desierto (Scchitocerca gregaria) y cómo se originan sus pautas de movimiento. El equipo espera que los nuevos conocimientos permitan mejorar los mecanismos de control de esta plaga que afecta sobre todo al África Occidental, causando grandes hambrunas y pérdidas millonarias en los países afectados.

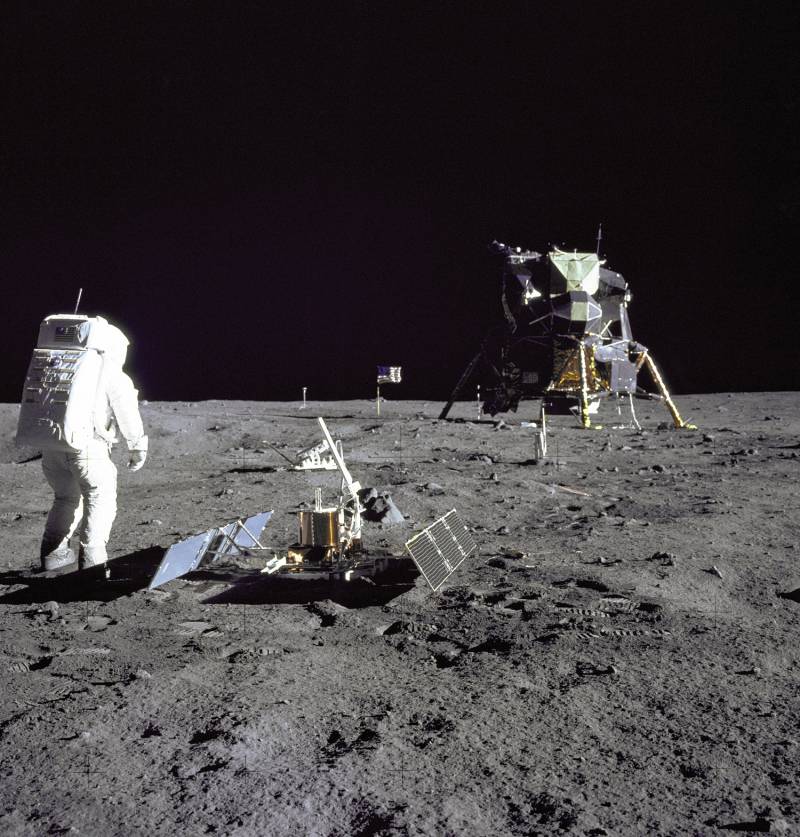
La imagen, tomada por Neil Armstrong, muestra en primer término el dispositivo Passive Seismic Experiment Package, detrás el reflector CCR, una cámara de televisión al fondo a la izquierda, y a la derecha el módulo lunar Eagle.

Un grupo de investigadores del departamento de Física Teórica de la Materia Condensada (Universidad Autónoma de Madrid) y del Instituto de Ciencia de Materiales de Madrid (CSIC) han estudiado cómo se mueven las moléculas de la superficie o “capa exterior” de un líquido y cómo entran y salen de esta capa.

Un equipo del Instituto de Automática Industrial (CSIC) ha desarrollado un algoritmo de adaptación para robots caminantes que mejora su movimiento y la estabilidad. El sistema supervisa los movimientos del robot, observa el entorno y modifica automáticamente los parámetros de locomoción. El algoritmo de adaptación, que se puede aplicar a cualquier robot, se incorpora al sistema de control de la máquina, por lo que no necesita supervisión humana. La investigación aparece en el número de abril de Autonomous Robots.

