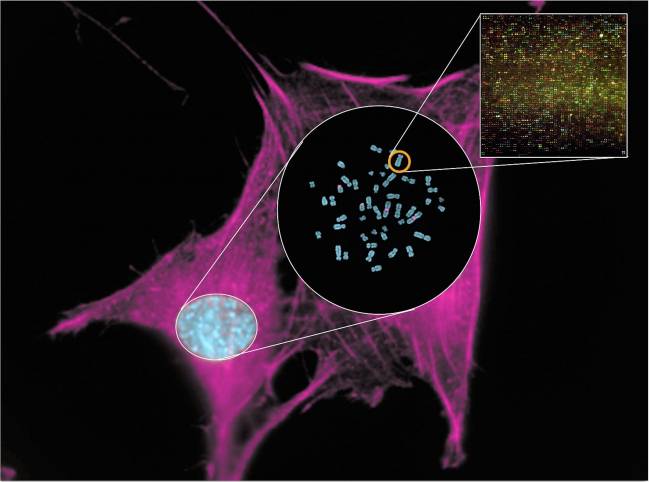
Un equipo científico de la Universidad de Oviedo y la empresa estadounidense Biomodels ha diseñado robots biomédicos que pueden resultar de gran ayuda en el estudio de enfermedades raras, neurodegenerativas e incluso cáncer.

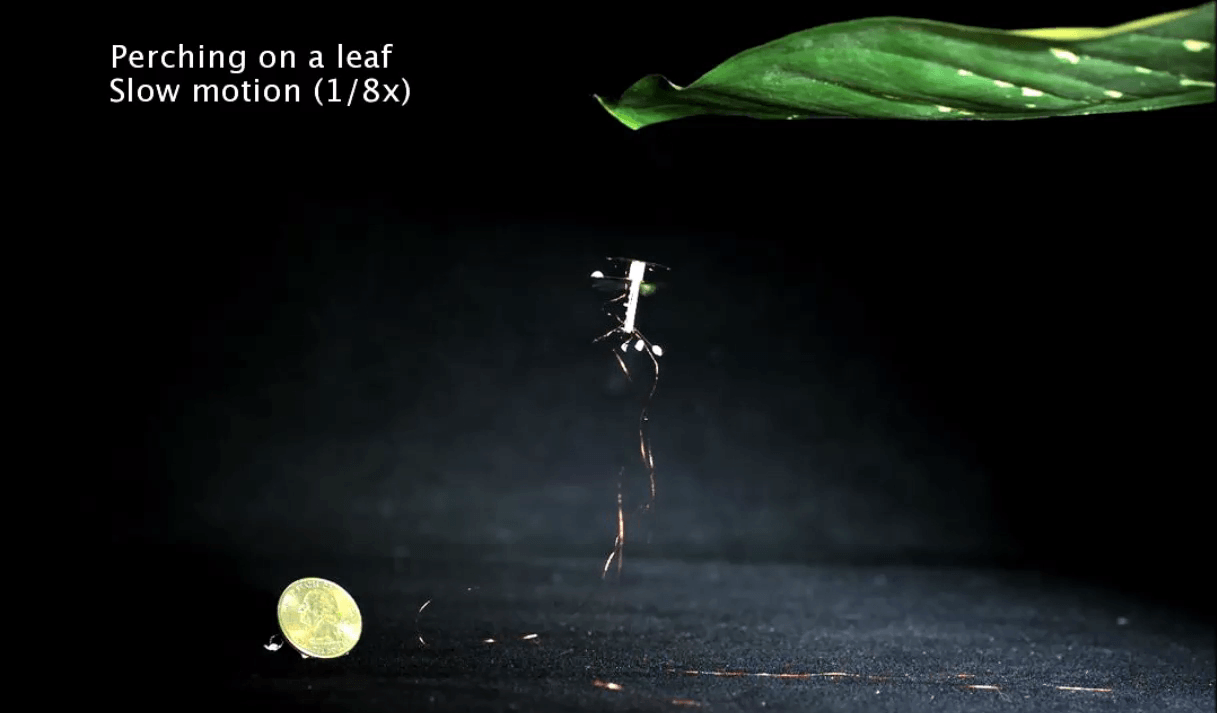
Octobot es el primer robot hecho íntegramente con materiales blandos capaz de moverse sin necesidad de baterías ni cables. El nuevo dispositivo, con forma de pulpo, ha sido fabricado con litografía blanda e impresión 3D, y es totalmente autónomo. Sus creadores dicen que con él se inaugura una nueva generación de robots capaces de adaptarse a entornos naturales mejor que las máquinas rígidas. Tendrá aplicaciones en biomedicina y en tecnologías portátiles.

En el subsuelo del edificio principal del MIT, Alberto Rodríguez pone a punto robots capaces de detectar y manipular objetos. A este ingeniero español le obsesiona la mano humana porque busca dotar a estas máquinas de la habilidad de interactuar mejor con el mundo. Su equipo se acaba de clasificar en tercera posición en el Amazon Picking Challenge, un concurso internacional en el que sistemas automáticos deben ordenar libros y paquetes en estanterías por sí solos.

El ‘planeador’ submarino RU29 ha sido recuperado en aguas próximas a Ciudad del Cabo, tras un viaje de ida y vuelta a Brasil desde esta ciudad sudafricana. Se trata de la primera vez que un vehículo autónomo y robotizado como este logra circunnavegar el Atlántico Sur. Los datos recogidos durante la travesía ayudarán a los estudios sobre el cambio climático.

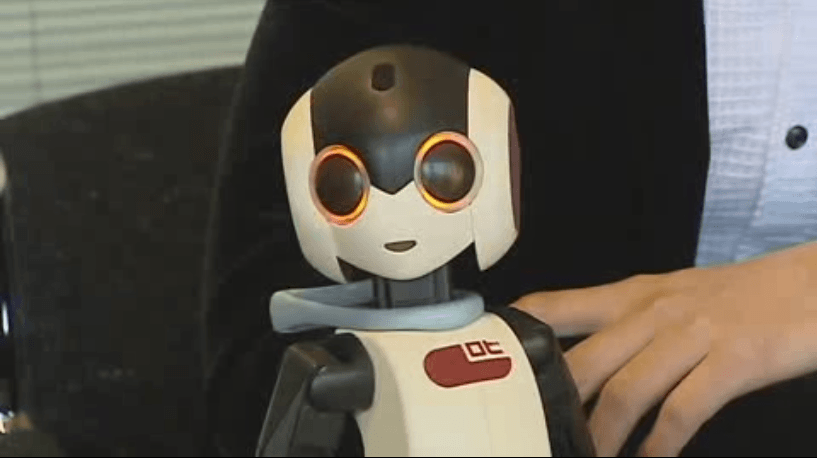
La imagen de un ingeniero de inteligencia artificial que diseña un exoesqueleto robótico nos traslada a los trajes de la serie de ciencia ficción Iron Man. Sin embargo, en la cabeza de Hiroshi Kobayashi estos dos conceptos se separan y toman caminos mucho más terrenales. El padre de la famosa androide Saya apuesta ahora por tecnologías al servicio de ancianos y personas sin movilidad.

Hiroshi Kobayashi prueba su traje de músculo en la feria Global Robot Expo, en Madrid.