Un equipo de investigadores españoles y australianos ha presentado en la revista Artificial Intelligence los fundamentos en los que se debe basarse un método universal para medir la inteligencia. Imagen: SINC

El grupo de Robótica Médica de la Universidad de Málaga (UMA) trabaja en un ambicioso proyecto de investigación que tiene por objetivo ayudar al cirujano mediante un asistente robótico. Dos "brazos" capaces de manejar tanto la cámara laparoscópica como una herramienta auxiliar a partir de la voz y los gestos del especialista.
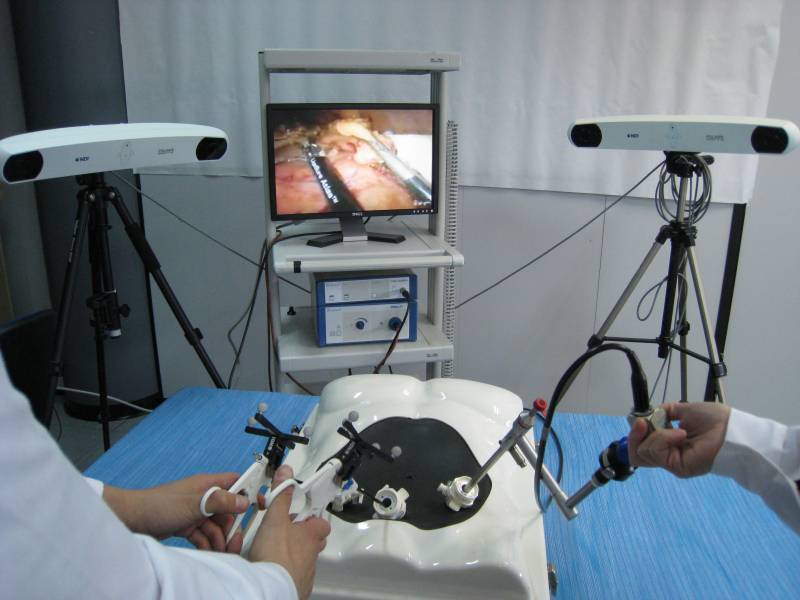
El uso de robots asistentes mejora la precisión en el manejo del instrumental. Además, si se emplea una adecuada comunicación entre el cirujano y el robot, se puede llegar a disminuir el tiempo en la intervención. /GRM


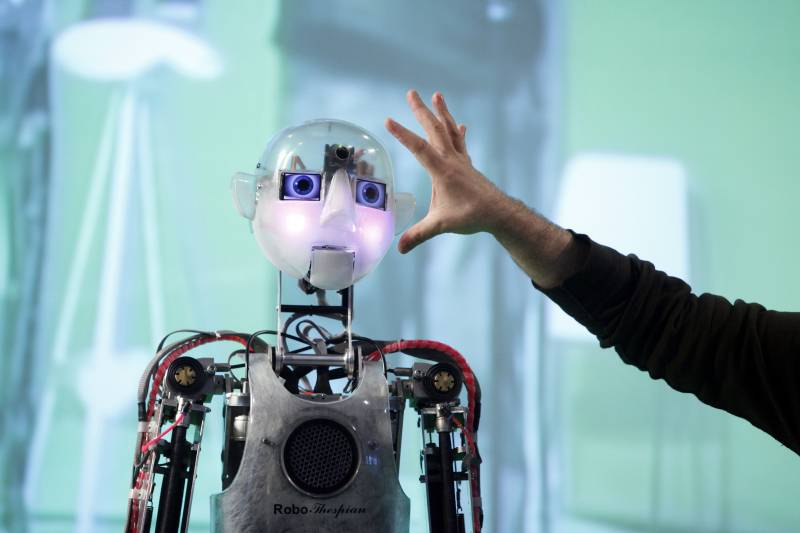
Investigadores de la Universidad Rey Juan Carlos (URJC), con el apoyo del CDTI y de la Real Academia de Ciencias, han creado AIsoy 1, un robot que percibe, se emociona y toma decisiones. El aparato ha sido seleccionado como finalista del premio de la Decision Analysis Society de la INFORMS, la sociedad americana de Investigación Operativa.

Los robots inteligentes que salen en las películas tienen poco que ver con la realidad. Sin embargo, es un hecho que la tendencia de la robótica actual es crear máquinas independientes en la medida de lo posible. En esta línea un grupo de la Universidad del País Vasco (UPV/EHU) ha proporcionado a un robot la capacidad de ver puertas e identificar los pomos, una aportación al reto de crear máquinas conscientes.

Además de labores industriales, como vienen realizando desde su origen, los robots pueden facilitar el trabajo de los seres humanos en cualquier ámbito. Buen ejemplo de su potencial es el proyecto Robauco (Robots autónomos y cooperantes), en el que ocho universidades y centros de investigación de todo el país, entre ellos la Fundación Cartif de Valladolid, han desarrollado robots capaces de cooperar con equipos de rescate en situaciones de emergencia.

El futuro de la fabricación y automatización se asienta sobre dos pilares básicos: la maquinaria portable y la robótica cooperativa, según ha quedado demostrado en la última Bienal de Máquina-Herramienta (BIEMH), celebrada en el recinto ferial BEC de Bilbao. La Unidad de Sistemas Industriales de Tecnalia mostró sus últimos avances tecnológicos.
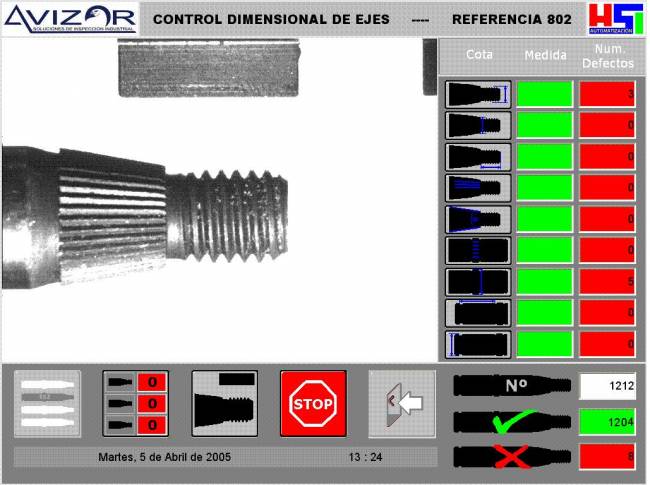
La inspección de productos industriales, el guiado de robots o el control del tráfico son sólo algunas de las aplicaciones de los sistemas de visión artificial. El Departamento de Ingeniería de Sistemas y Automática de la Universidad de Valladolid la emplea también en el campo de la metrología, la disciplina que se ocupa del estudio de los sistemas de medidas. La visión artificial puede alcanzar una precisión por debajo de la centésima de milímetro, lo que le hace ser un sistema atractivo para su implantación en industrias como la del automóvil.


